Why?
There are many walking robots, including bipeds, available from several vendors. They are mostly highly priced: something like the brilliant RoboNova would easily set us back US$1,000. If we aim our sights at a less expensive, less functional piece, it still might run to UK£200. My objective is to create one for under £50, from parts available at any DIY shop (including eBay!) and reusing as much of the stuff I already have lying around.
Materials
 Having tried several materials, such as right-angle aluminum extrusion, I found none of them suitable and was on the verge of giving up. To have the pieces fabricated would defeat the purpose of the exercise and was going to prove massively expensive. Late in November of 2007, I settled on a most unexpected material: box section PVC plastic ducting.
Having tried several materials, such as right-angle aluminum extrusion, I found none of them suitable and was on the verge of giving up. To have the pieces fabricated would defeat the purpose of the exercise and was going to prove massively expensive. Late in November of 2007, I settled on a most unexpected material: box section PVC plastic ducting.
This stuff is typically used in home extraction fan systems and is sold at most DIY shops in 1m lengths for around £8. If I hadn't botched so many of my first attempts, I'd say that a 1m length would have been plenty to build a functional pair of legs and a body core.

The choice for motorising the legs was not so difficult. It had to be the servos used in radio control toys. These can be positioned quite precisely, have a rotation of about 180 degrees and can be controlled directly from a microprocessor with no worries about position feedback. As it happened I had many of these around as I am a fan of R/C cars. If they're sought new, they can be obtained readily on eBay. At the time of writing, £12 would readily buy you FOUR!
There are many walking robots, including bipeds, available from several vendors. They are mostly highly priced: something like the brilliant RoboNova would easily set us back US$1,000. If we aim our sights at a less expensive, less functional piece, it still might run to UK£200. My objective is to create one for under £50, from parts available at any DIY shop (including eBay!) and reusing as much of the stuff I already have lying around.
Materials
 Having tried several materials, such as right-angle aluminum extrusion, I found none of them suitable and was on the verge of giving up. To have the pieces fabricated would defeat the purpose of the exercise and was going to prove massively expensive. Late in November of 2007, I settled on a most unexpected material: box section PVC plastic ducting.
Having tried several materials, such as right-angle aluminum extrusion, I found none of them suitable and was on the verge of giving up. To have the pieces fabricated would defeat the purpose of the exercise and was going to prove massively expensive. Late in November of 2007, I settled on a most unexpected material: box section PVC plastic ducting.This stuff is typically used in home extraction fan systems and is sold at most DIY shops in 1m lengths for around £8. If I hadn't botched so many of my first attempts, I'd say that a 1m length would have been plenty to build a functional pair of legs and a body core.

The choice for motorising the legs was not so difficult. It had to be the servos used in radio control toys. These can be positioned quite precisely, have a rotation of about 180 degrees and can be controlled directly from a microprocessor with no worries about position feedback. As it happened I had many of these around as I am a fan of R/C cars. If they're sought new, they can be obtained readily on eBay. At the time of writing, £12 would readily buy you FOUR!
 Having been reasonably satisfied with M4 bolts for holding things together (complete overkill for a plastic toy, but readily obtainable and inexpensive) I found these lovely little 4mm plastic rivets on eBay. They hold things together amazingly well.
Having been reasonably satisfied with M4 bolts for holding things together (complete overkill for a plastic toy, but readily obtainable and inexpensive) I found these lovely little 4mm plastic rivets on eBay. They hold things together amazingly well.I've been programming Microchip PICs for a couple of years in their native RISC assembly language and am quite comfortable with that, so the only debate over the choice of control hardware was: which one should I use? (More on that later.)
How?
After prancing around the house for several days, trying to bend only one joint at a time to establish which ones I really needed in order to walk, I concluded as follows. I need:
- ankles which bend up and down (pitch)
- knees which bend back and forth (pitch)
- and hips which bend forward and back and which can rotate (pitch and roll).
Oh. One more thing comes to mind: when lifting one leg, it's likely to fall over. That's OKay, because when we walk, that's basically what happens. It's a kind of controlled falling. So, how do we control the fall a bit better? We have a heavy torso, which can be twisted and shifted. The best solution I can come up with is to mount the weighty component of this robot (the battery) pretty high up on a beam parallel with the "waist." This beam will be cross-braced (triangulation style) by another servo. Thus, the servo will be able to shift a large weight from side to side to counterbalance.




5 comments:
Ha! Your first post!!!! You need to find it a name! Can't believe I had to create an account to leave a comment!
Can you think of a name? If you like, you can be the official suggester of names.
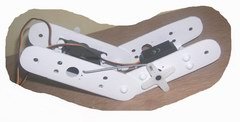
Apart from that, what do you think of my legs?
(-:
Too stumpy...
"Stumpy." We have a name. The best alternative was "Waisted." It seems appropriate, given that it's unlikely the 'bot will ever have arms or a head.
Coming along nicely.
Post a Comment